Concept
La technologie, nommée Processeur de Charge Capacitive, propose une solution qui utilise les propriétés de la résonance électrique pour alimenter un moteur synchrone à aimants permanents. Le concept de la technologie consiste à connecter en tout temps un condensateur préchargé en série avec chaque phase du moteur durant son opération à haute vitesse, c’est-à-dire lorsque la tension de la batterie n’est plus suffisante pour obtenir le couple maximal. La somme de la tension d’alimentation et du condensateur préchargé augmente significativement la tension de phase disponible et permet de maintenir le couple maximal sur une plage de vitesse étendue.
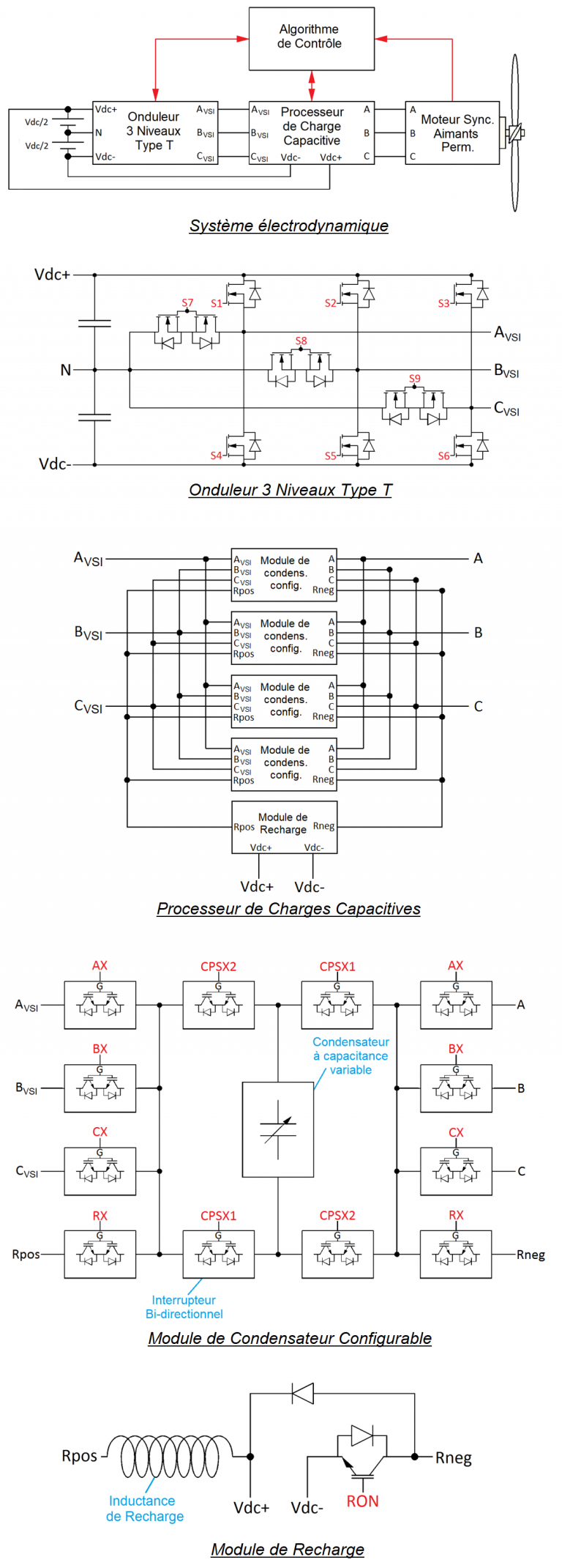
L’architecture du Processeur de Charge Capacitive est modulaire. Pour s’adapter à un moteur triphasé, il contient quatre Modules de Condensateurs Configurables (MCC) et un Module de Recharge. En alternance, chaque MCC se connecte à une phase motrice pour se décharger ou au Module de Recharge pour se recharger. En tout temps, trois Modules de Condensateurs Configurables (MCC) se déchargent dans une phase motrice pendant que le dernier MCC se recharge à travers le Module de Recharge. Chaque MCC peut déterminer sa polarité relative à la phase motrice ou au module de recharge grâce au pont en H.
Le circuit capacitif-inductif créé par le MCC et le Module de Recharge bénéficie de la dynamique résonante afin de récupérer l’énergie capacitive résiduelle et ainsi élever la tension du condensateur au-dessus de la tension de la batterie.
L’onduleur trois niveaux de type T assiste la décharge des condensateurs pour façonner un courant de phase sinusoïdal, lisse et aligné sur le vecteur de la force contre-électromotrice afin de générer le couple maximal par ampère.
Des capteurs de courant de phase, de position angulaire du rotor et de tension des condensateurs permettent à l’algorithme de contrôle d’obtenir les informations nécessaires à l’opération du moteur. L’algorithme de contrôle gère l’opération de l’onduleur et du Processeur de Charge Capacitive afin d’opérer le moteur au couple et à la vitesse voulue. Entre autres, l’algorithme de contrôle détermine la polarité de chaque MCC, attitre les MCC aux phases motrices ou au Module de Recharge, commande la tension de sortie de l’onduleur et gère la recharge des condensateurs de façon à obtenir le niveau d’énergie capacitive voulu avant le cycle de décharge.
Les interrupteurs bidirectionnels sont implémentés en connectant deux transistors en antiparallèle (face à face). De cette façon, les interrupteurs bidirectionnels permettent soit une libre circulation du courant dans les deux sens, soit une coupure complète du courant dans les deux sens. La dynamique de la décharge et de la recharge étant fonction des capacitances et de l’inductance, ces derniers sont dimensionnés de façon à ce que la dynamique de recharge et décharge corresponde aux besoins de fonctionnement du système, en symbiose avec le moteur électrique.